//
The diploma thesis, “NEVTRONSKA DIFUZIJA V VODI” (Neutron Diffusion in Water), presents the development and implementation of an automated experimental system designed to study neutron diffusion in water at various temperatures.
The project built upon previous work, with the system being significantly enhanced through comprehensive automation, the development of a graphical user interface (GUI), and robust integration of all hardware and software components.
///
Project Goal

The Project Goal: The primary objective was to design, build, and validate an automated system capable of precise measurement of neutron diffusion length (L) in water under varying temperature conditions.
Significance of This Work:
- Neutron diffusion is a cornerstone of nuclear reactor physics, material science, and medical applications.
- The diffusion length (L) is a critical parameter that was aimed to be measured; it describes how far neutrons travel in a medium before absorption or escape and is essential for reactor design, radiation shielding, and validating computational models.
- Through automation, the aim was to improve measurement accuracy, repeatability, efficiency, and safety.
- The developed system now serves as an important educational and research tool at the Jožef Stefan Institute (F8 department).
////
The Experimental Setup
Core Setup Used:
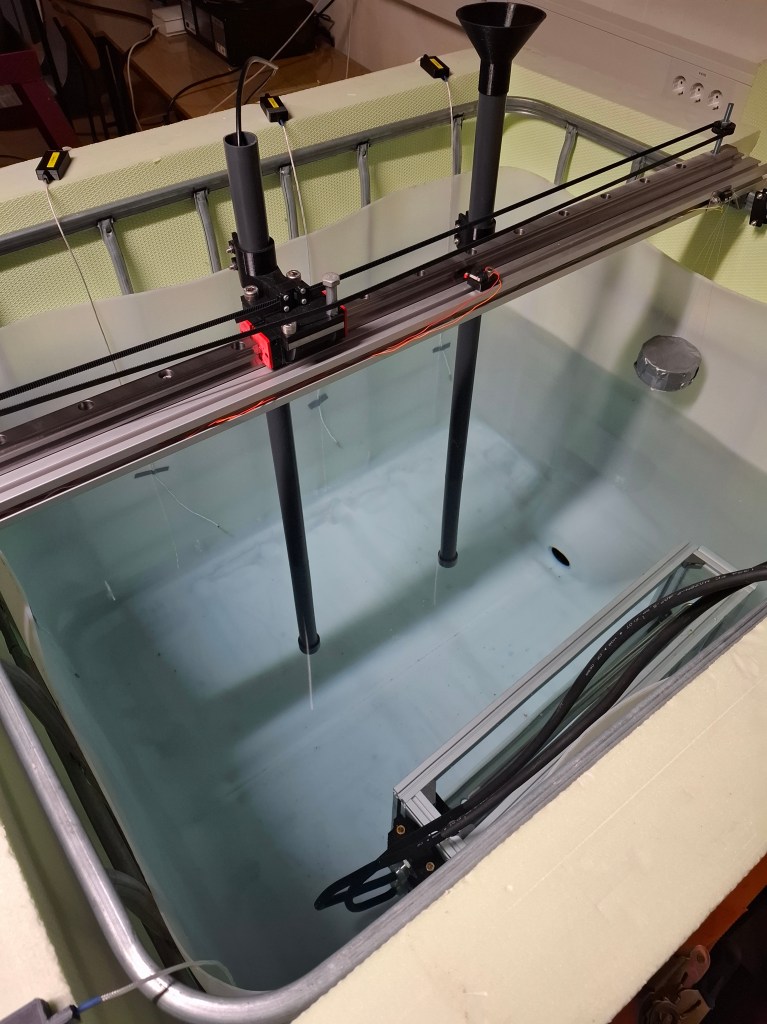
- The experimental core consisted of a large cubic polyethylene container which was filled with water to act as the moderating medium.
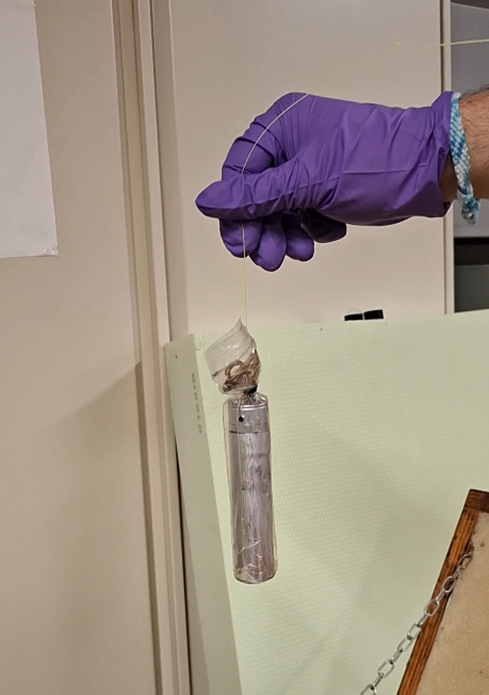
- A Helium-3 (He-3) neutron detector was mounted on a linear rail system, designed to allow precise, automated movement away from the source.
NEUTRON SOURCE:
A static Americium-Beryllium (Am-Be) neutron source was positioned centrally within the water.
Measurement Principle Followed:
- Using the He-3 detector, the neutron flux (Counts Per Second – CPS) was measured at various distances (r) from the source.
- The neutron flux is expected to decrease with distance according to diffusion theory: φ(r) ∝ (1/r) * exp(-r/L).
- By taking CPS measurements at different distances and temperatures, the diffusion length L could be determined.
- Linearization for Analysis: The collected data was transformed using the equation ln(CPS * r) = ln(K) – r/L. By plotting ln(CPS * r) versus r, a straight line could be obtained with a slope of -1/L, from which L was calculated.
/////
System Automation
A key contribution of this work was the system’s comprehensive automation, for which various hardware and software components were integrated:
- Hardware Utilized:
- Raspberry Pi 5: This was selected as the central control unit. It runs the main Python application developed for this thesis, hosts the GUI designed for this thesis, controls the stepper motor, and manages communication with other devices.
- Red Pitaya FPGA (STEMLAB 125-14): This was configured to function as a high-speed Data Acquisition (DAQ) server (downscaled to 100 kS/s) for the He-3 detector signals. It runs a Linux Alpine OS and communicates with the Raspberry Pi via Ethernet.
- ESP32 Microcontroller: This was programmed to manage five PT100 temperature sensors (via Adafruit MAX31865 modules using SPI), calculate the average water temperature, implement a hardware safety cutoff for the heater (at 85°C), and transmit temperature data to the Raspberry Pi via UART.
- Helium-3 Detector: This was used for detecting thermal neutrons.
- Stepper Motor & Rail System: This was implemented to allow precise, automated positioning of the He-3 detector.
- Heater & Water Pump: These were integrated for controlling and homogenizing water temperature.
- Relays (Songle 2-channel): These were used to control the heater, incorporating a dual-control logic (requiring agreement from both the ESP32 and Raspberry Pi) for enhanced safety.
- Temperature Sensors (PT100): These were used to monitor water temperature at multiple points.
- Software & Control System Developed/Configured:
- Python Application (on Raspberry Pi 5):
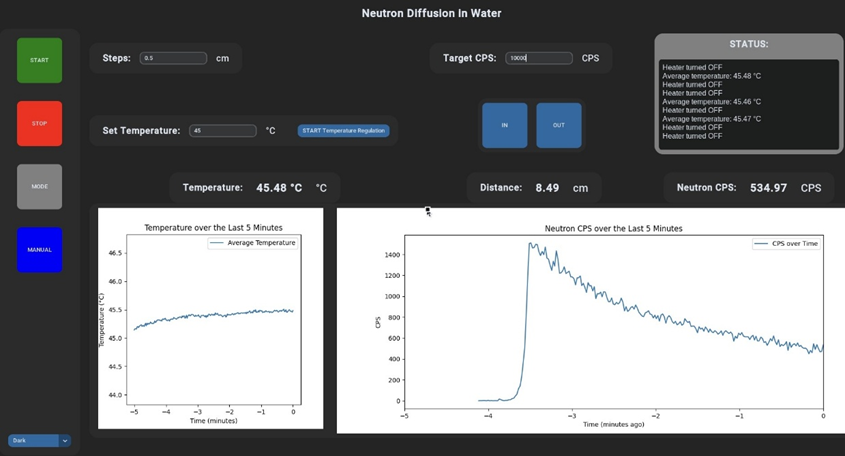
- GUI (Tkinter & CustomTkinter): This user-friendly interface was designed and developed to control the experiment, display real-time data (CPS, temperature, detector position), and allow setting of experimental parameters. It features status bars and history graphs for CPS and temperature.
- Control Logic: The logic was written to manage stepper motor movement, heater operation (based on temperature setpoints and feedback), and data logging.
- Julia Script (on Raspberry Pi 5): A Julia script was utilized and integrated to receive raw data from the Red Pitaya. This script performs essential signal processing, including Pulse Shape Discrimination (PSD), which was configured by the author to distinguish neutron events from gamma background and noise, calculates CPS, and sends these values to the Python GUI.
- ESP32 Firmware: The firmware was written for the ESP32 to read temperature sensors, calculate the average, implement safety overrides, and communicate with the Raspberry Pi.
- Python Application (on Raspberry Pi 5):
- Data Acquisition & Processing Implemented:
- The Red Pitaya, as configured, acquires raw detector pulses.
- The Julia script processes these pulses (filtering, baseline correction, PSD).
- It was ensured that processed data (CPS, temperature, position, timestamp) is logged into CSV files for subsequent offline analysis.
Operating Modes Programmed (via GUI):
- Automatic Mode
- Mode 1 (Time Measurement)
- Mode 2 (Time to 10,000 Events)
//////
RESULTS
Key experimental results were obtained at various water temperatures (e.g., 20°C, 25°C, 35°C, 45°C).

The diffusion length (L) findings were:
- At 20°C: L ≈ 8.62 cm (1/L ≈ 0.1160 cm⁻¹), close to the literature value of 1/L ≈ 0.12 cm⁻¹.
- At 25°C: L ≈ 8.01 cm (1/L ≈ 0.1248 cm⁻¹).
- At 35°C: L ≈ 7.95 cm (1/L ≈ 0.1258 cm⁻¹).
- At 45°C: L ≈ 7.98 cm (1/L ≈ 0.1253 cm⁻¹).
The observed temperature dependence showed a slight decrease in L as temperature initially increased from 20°C, followed by a slight stabilization/increase at higher tested temperatures. While theoretically, L is expected to slightly increase with temperature due to decreasing water density, the observed deviation is likely due to experimental uncertainties, statistical fluctuations, and potentially minor uncalibrated systematic effects. However, the absolute L values obtained remained within the generally accepted range reported in the literature. The automated system developed for this thesis demonstrated stable and reliable operation, enabling precise control and efficient data collection, with the implemented PSD technique effectively discriminating neutron signals.
///////
THESIS:
COMING SOON!
